On 13 and 14 September, the FGVT and the FTS - Future Transportation Society - Competence Centre organized the first saarMobility Congress under the motto "Digitalization and climate neutrality in transport and logistics".
Two exciting days full of innovative ideas and presentations attracted around 80 participants.

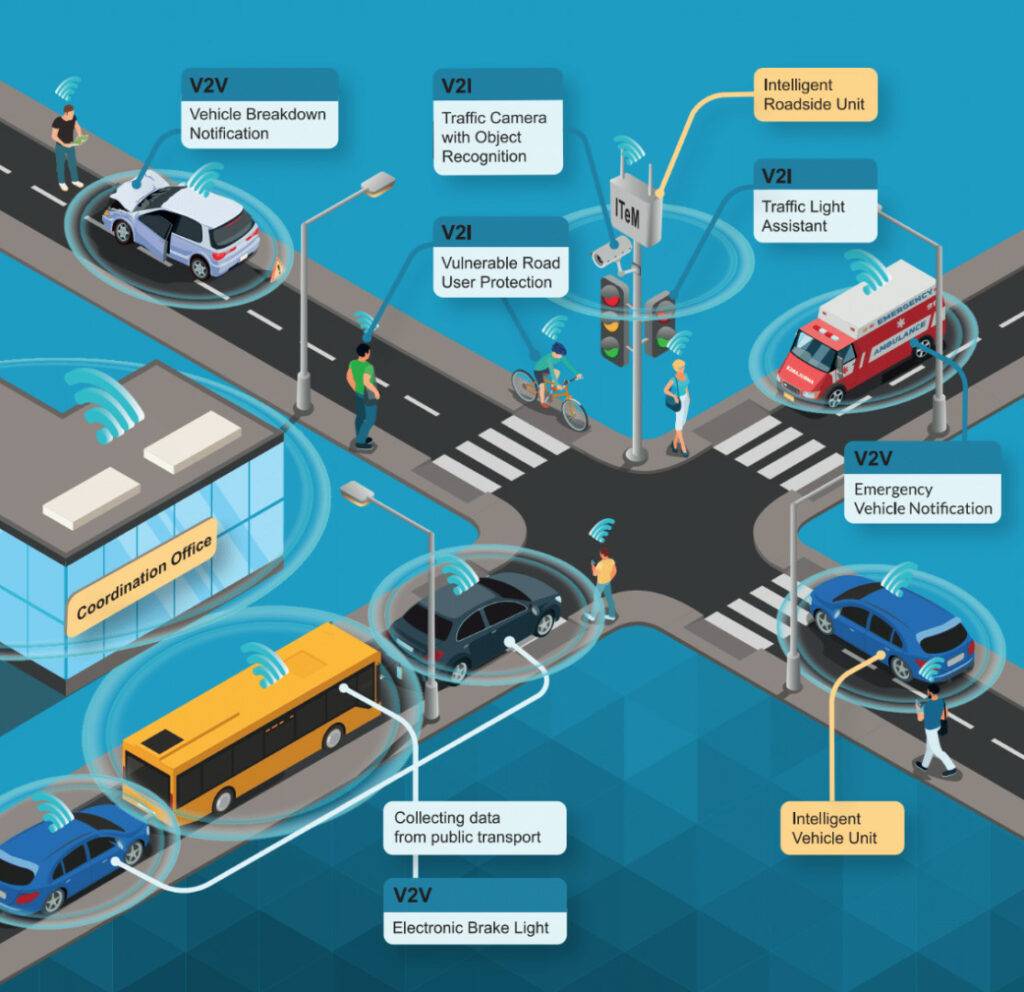
Three further crossroads were equipped with RSUs, cameras and communication units in the ITeM test field on February 21, 2023.

Day 1 - Expert presentations and panel discussion on transport infrastructure and autonomous driving, how less traffic and more mobility can be achieved.
Tag 2/3 - Demofahrten: Vernetzte Mobilität live erleben

Opening of the Open test field day 2019 by Dr. Susanne Reichrath (Representative of the Minister President for Science, Universities and Technology in Saarland), Jürgen Barke (State Secretary for Economic Affairs, Labour, Energy and Transport), Prof. Dr.-Ing. Horst Wieker (FGVT), Markus Hoffeld (Mayor of Merzig)
Cooperative automated driving in the neurocognitive test field Saarland.
Goal: To determine the driver's willingness and ability to take over or hand over the driving task in semi-automated vehicles by recording traffic situations in the ITS test field Merzig and Saarbrücken.

Opening of the Open test field day 2017: from left to right Anke Rehlinger (then Saarland Minister of Transport), Prof. Dr.-Ing. Horst Wieker (FGVT), Markus Hoffeld (Mayor of Merzig)


Linking intelligent driving functions with infrastructure-based data to improve electromobility in Merzig