Am 13. und 14. September veranstaltete die FGVT zusammen mit dem Kompetenzzentrum FTS - Future Transportation Society - des ersten saarMobility Kongresses unter dem Motto "Digitalisierung und Klimaneutralität in Verkehr und Logistik".
Zwei spannende Tage voller innovativer Impulse und Vorträge zogen rund 80 Teilnehmende an.

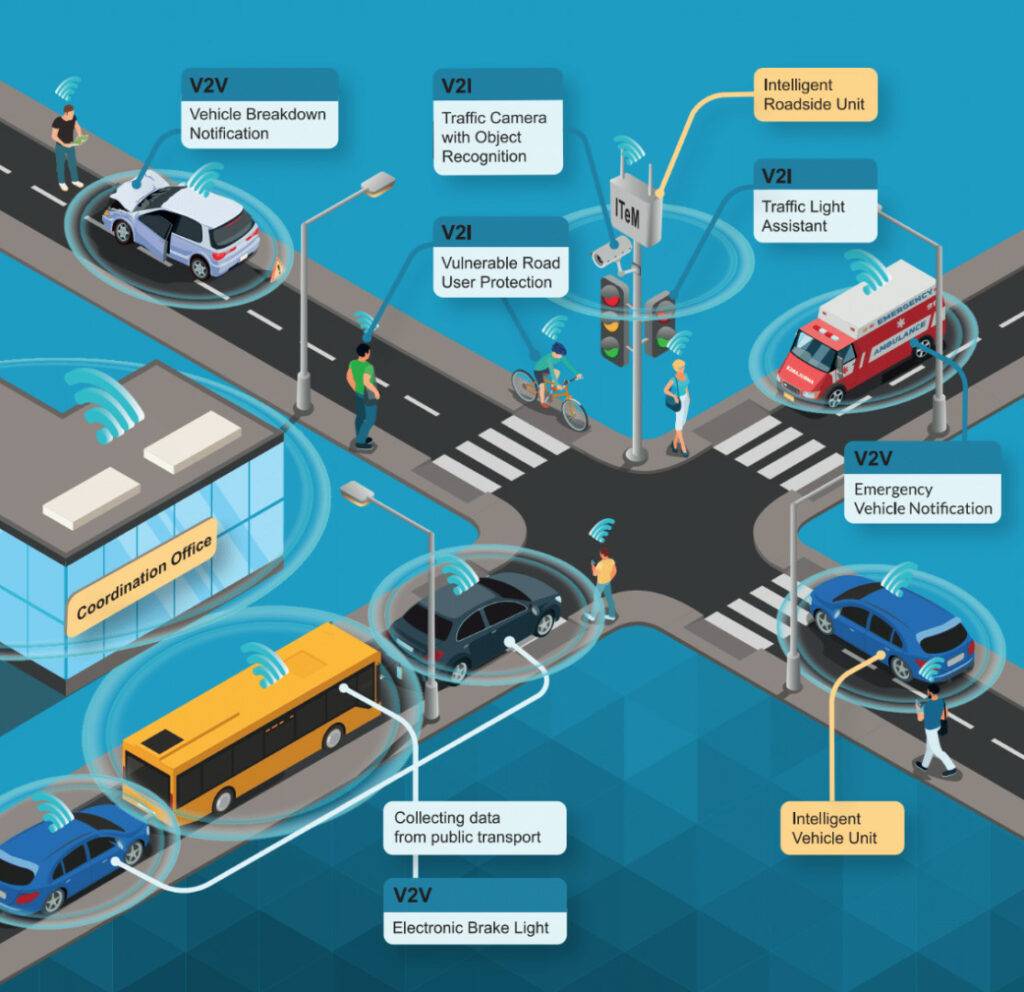
Drei weitere Kreuzungen wurden im ITeM Testfeld am 21. Februar 2023 mit RSUs, Kameras und Kommunikationseinheiten ausgestattet.

Tag 1 - Fachvorträge und Podiumdiskussion über Verkehrsinfrastruktur und autonomes Fahren, wie weniger Verkehr und mehr Mobilität erreicht werden kann.
Tag 2/3 - Demofahrten: Vernetzte Mobilität live erleben

Eröffnung des TdoT 2019 durch Dr. Susanne Reichrath (Beauftragte des Ministerpräsidenten für Wissenschaft, Hochschulen und Technologie im Saarland), Jürgen Barke (Staatssekretär für Wirtschaft, Arbeit, Energie und Verkehr), Prof. Dr.-Ing. Horst Wieker (FGVT), Markus Hoffeld (Bürgermeister Merzig)
kooperatives automatisiertes Fahren im neurokognitiven Testfeld Saarland.
Ziel: Feststellung der Bereitschaft und Möglichkeit des Fahrers zur Übernahme oder Übergabe der Fahraufgabe in teilautomatisierten Fahrzeugen mittels Aufzeichnung von Vekehrssitusationen im ITS Testfeld Merzig und Saarbrücken.

Eröffnung des TdoT 2017: v.l.n.r. Anke Rehlinger (damalige saarländische Verkehrsministerin), Prof. Dr.-Ing. Horst Wieker (FGVT), Markus Hoffeld (Bürgermeister Merzig)


Verknüpfung von intelligenten Fahrfunktionen mit infrastrukturbasierten Daten zur Verbesserung der Elektromobilität in Merzig